3. [Micropython]TPYBoard v702 GPRS功能测试¶
版权声明:翻译整理属于TPYBoard,转载时请以超链接形式标明文章原始出处和作者信息及本声明
3.1. 什么是TPYBoard v702¶
TPYBoard v702是山东萝卜电子科技有限公司最新开发的,目前市面上唯一支持通信通信功能的MicroPython开发板:支持Python3.0及以上版本直接运行。支持GPS+北斗双模通信、GPRS通信、短信功能、电话功能;板载温湿度、光敏、三轴加速度传感器、蜂鸣器、LCD5110显示屏。免费提供通信测试服务平台。
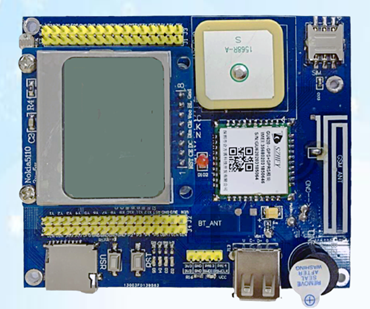
TPYBoard v702实物图
3.2. TPYBoardV702使用GPRS功能把数据上传至服务器¶
具体要求
利用TPYBoard v702使用GPRS功能把数据上传至服务器
所需器件
- TPYBoard v702开发板 1块
- SIM卡 1张(支持移动、联通)
板载通信功能及使用介绍
TPYBoard v702的开发板的整体整体亮点置一就是能板载通信功能,只要在开发板的卡槽上插上一张可以使用的手机卡(不支持电信),即可使用该功能。开发板板载的通信功能包括了电话,短信,GPRS等功能,在这个实验里面我们只使用GPRS这个功能。我们使用GPRS功能,主要是为了借助这个功能向服务器透传数据,所以我们第一步是要打开透传功能。然后我们要和服务器建立连接,这时我们需要知道服务器的地址和端口。这个实验我们借用官方提供的测试平台,发送一个自己编辑的数据包,来学习一下GPRS功能的使用方法。
3.3. 制作主要过程¶
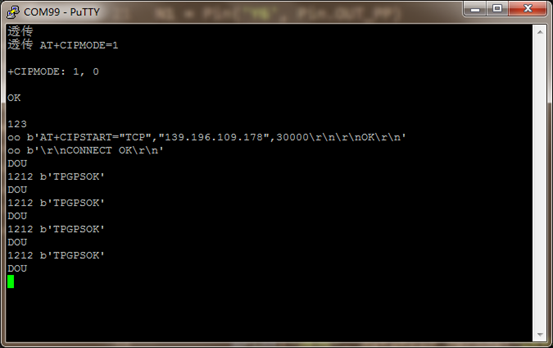
先上个图,下面再开始说代码的问题。
Putty数据监控图
示例定位图

制作步骤
(1)第一步是先把手机卡插到开发板开槽上,需要保证手机卡可以使用;
(2)在上面工作完成后,我们开始main().py文件代码的编辑;
(3)对需要用到的类库进行声明和定义;
(4)把我们需要使用的变量进行一下定义;
(5)把我们需要用到的接口进行声明和定义,这里我们主要用到了串口4这个接口,声明串口4的时候,需要把串口波特率设置为115200
(6)下面开始主函数的编写,这个实验里面我们用到了数据包,我们先新建一个符合格式的数据包;
(7)完成以上之后,我们需要做一个最重要的事情,那就是定义“Y6”引脚为输出,然后把:“Y6”引脚拉低两秒以上,之后把此引脚拉高。因为“Y6”引脚是控制整个板载通信系统开启的开关,如果平时我们没有用到通信系统的话,为了节省功耗,板载通信系统是处于关闭状态的,需要使用时只需要拉低“Y6”引脚两秒以上;
(8)当看到开发板上的红色直插LED灯快速闪烁的时候,说明板载通信系统正在启动,当这个红色直插指示灯结束快闪(如果插在开发板卡槽上的手机可用,指示灯处于慢闪状态)说明板载通信系统已经启动;
(9)完成以上工作后,准备工作就已经完成了,下面我们需要先把通信系统的通信方式设置为透传,之后再和相应的服务器地址和端口进行连接;
(10)和服务器建立连接后,就可以开始想服务器发送数据了,直接把数据从串口4送出去就可以了,通信系统会原封不动的把你发的数据发送到服务器。
具体代码
import pyb
import upcd8544
from machine import SPI,Pin
from pyb import UART
#lcd5110初始化
SPI = pyb.SPI(1) #DIN=>X8-MOSI/CLK=>X6-SCK
#DIN =>SPI(1).MOSI 'X8' data flow (Master out, Slave in)
#CLK =>SPI(1).SCK 'X6' SPI clock
RST = pyb.Pin('X20')
CE = pyb.Pin('X19')
DC = pyb.Pin('X18')
LIGHT = pyb.Pin('X17')
lcd_5110 = upcd8544.PCD8544(SPI, RST, CE, DC, LIGHT)
lcd_5110.clear()
lcd_5110.lcd_write_string('Getting Ready',0,1)
#GU620模块初始化
N1 = Pin('Y6', Pin.OUT_PP)#定义通信系统启动引脚
N1.low()
pyb.delay(2000)
N1.high()
pyb.delay(10000)#拉高拉低引脚,启动通信系统
u2 = UART(4,115200,timeout = 100)#定义串口4,设置 波特率为115200
#报文详细格式说明参照萝卜电子服务平台示例报文格式。
#www.turnipsmart.com:8080
message = 'TPGPS,1234567890abcde,36.67191670,119.17200000,201701120825,25,50,END'
if __name__ == '__main__':
#连接TCP服务器
u2.write('AT+CIPSTART="TCP","139.196.110.155",30000\r\n')
while True:
if u2.any() > 0:
_dataRead = u2.read()
print('_dataRead:',_dataRead)
if _dataRead.find(b'CONNECT OK') > -1:
#说明已经和服务器成功建立连接
lcd_5110.lcd_write_string('CONNECT OK',0,2)
print('CONNECT OK')
pyb.LED(2).on()
#发送指令进入透传模式
u2.write('ATO0\r\n')
if _dataRead.find(b'ATO0\r\n\r\nOK\r\n') > -1:
#成功进入透传模式,退出透传模式发送+++,注意前后1秒内不能输入任何字符
#发送数据给服务器
u2.write(message)
if _dataRead.find(b'TPGPSOK') > -1:
#该数据为服务器返回
#在向服务器发送了数据后,服务器会对数据进行判断,并返相应的报文
pyb.LED(3).on()
lcd_5110.lcd_write_string('SEND OK',0,3)
break