1. [Micropython]TPYBoard v202 PWM控制舵机¶
版权声明:翻译整理属于TPYBoard,转载时请以超链接形式标明文章原始出处和作者信息及本声明
1.1. 实验目的¶
- 学习舵机的工作原理和使用方法(舵机型号:SG90)
- 学习TPYBoard v202中PWM控制舵机
1.3. 舵机的基本介绍¶
舵机的组成与参数
舵机,又称伺服马达,是一种具有闭环控制系统的机电结构。舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。 其工作原理是由控制器发出PWM(脉冲宽度调制)信号给舵机,经电路板上的IC处理后计算出转动方向,再驱动无核心马达转动, 透过减速齿轮将动力传至摆臂,同时由位置检测器(电位器)返回位置信号,判断是否已经到达设定位置,一般舵机只能旋转180度。
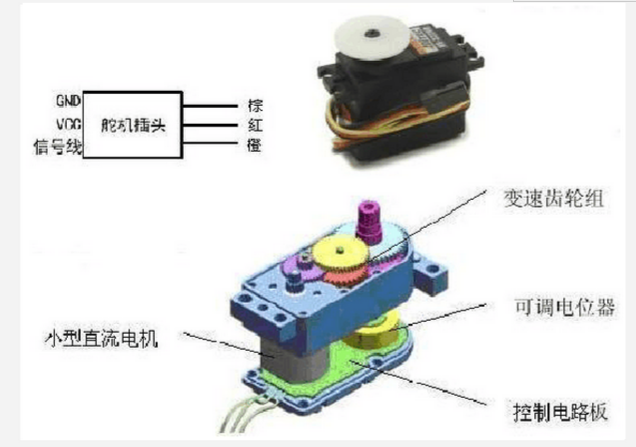
舵机的接线
舵机有3根线,棕色为地,红色为电源正,橙色为信号线,但不同牌子的舵机,线的颜色可能不同。
舵机的控制原理
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的。
占空比:
1.指高电平在一个周期之内所占的时间比率。
2.正脉冲的持续时间与脉冲总周期的比值。例如:正脉冲宽度1μs,信号周期10μs的脉冲序列占空比为0.1。即:脉冲的宽度除以脉冲的周期称为占空比。标准PWM(脉冲宽度调制)信号的周期固定为20ms(50Hz),理论上脉宽分布应在1ms到2ms之间,但是,事实上脉宽可由0.5ms到2.5ms之间,脉宽和舵机的转角0°~180°相对应。
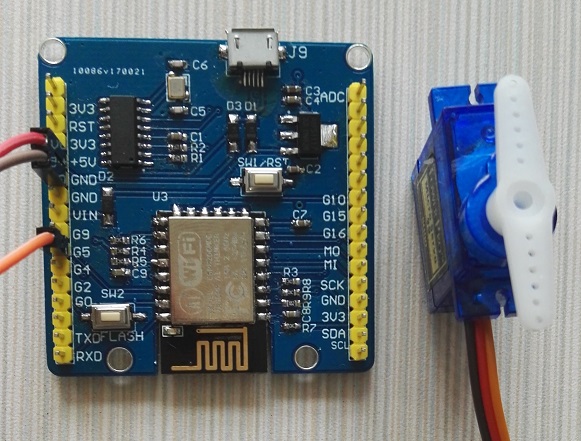
1.4. 硬件的连接¶
示意图
TPYBoard V202 SG90舵机 +5V 正极(红色线) GND 负极(棕色线) G5 信号(橙色线) 实物图