2. [Micropython]TPYBoard v102 获取REPL提示信息¶
版权声明:翻译整理属于TPYBoard,转载时请以超链接形式标明文章原始出处和作者信息及本声明
2.1. 前言¶
REPL(交互式解释器)全称是 Read Evaluate Print Loop,TPYBoard 允许用户和 MicorPython 的交互式连接。 使用REPL是迄今为止来测试你的代码、获取程序错误信息和运行命令的最简单的方法。
2.2. REPL调试¶
使用REPL需安装USB转串口的驱动,不同的系统不同的安装方式。
2.2.1. Windows¶
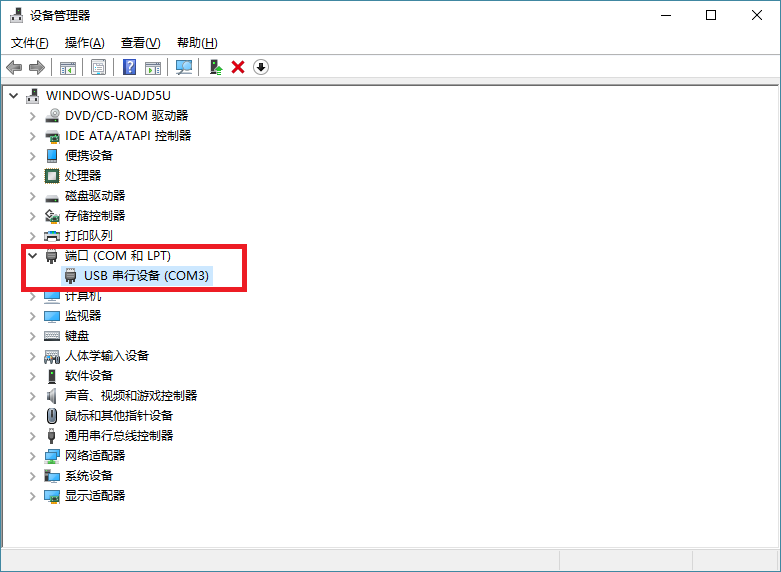
大部分win10系统会自动安装驱动。安装完成后,打开【设备管理器】就可以看到安装的端口号。
其他情况下,会出现下面的提示。
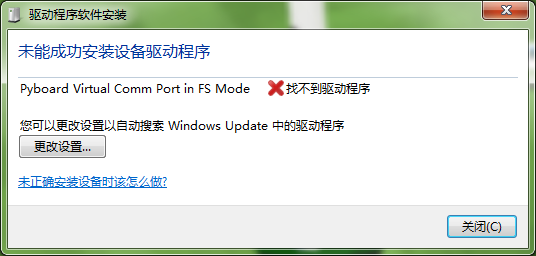
这时就需要我们去【设备管理器】进行手动安装。【其他设备】下看到一个带黄色感叹号图标的设备,右键选择更新驱动程序文件,定位到 TPYBFLASH 目录即可。
但是,有的朋友的电脑可能会安装失败,主要有两种情况:
Windows下我们使用PuTTY软件进行REPL交互。 下载PuTTY软件
打开Putty软件,【Connection type】分类中选择【Serial】串口模式,输入串口端口号和波特率(默认波特率:9600)。例如端口号是COM10 (这里的端口号是指自己设备管理器对应的端口号) 。
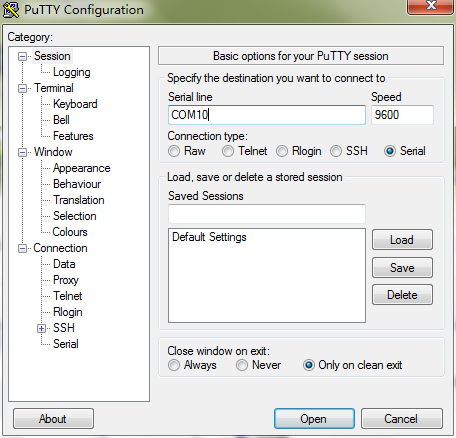
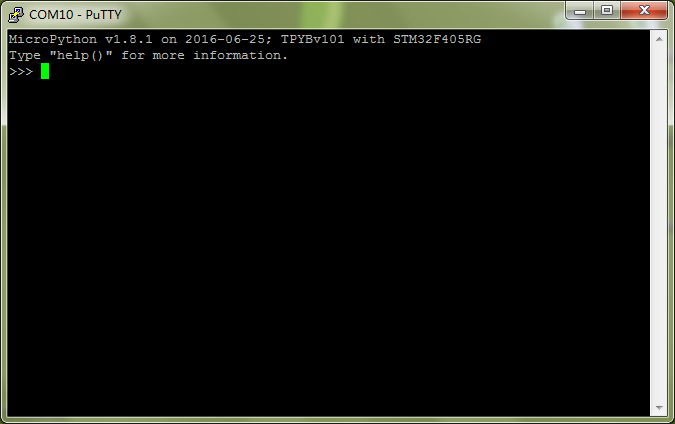
点击【Open】,进行连接。连接成功后,如下图:
有时打开时无任何信息,就看见一个光标和空屏幕,如下图:
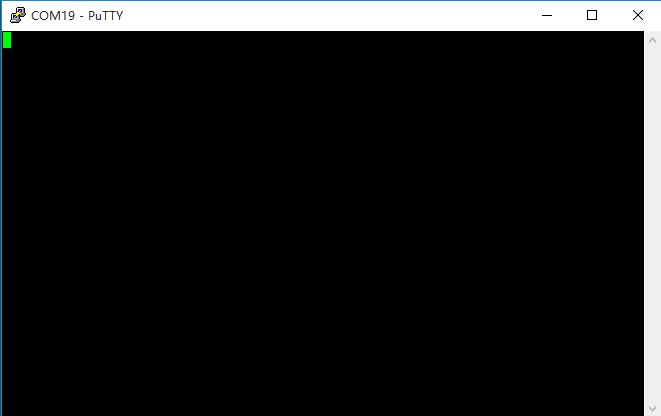
出现这种情况下,不用担心,并不是没有连接成功,而是当前没有信息输出而已。这时,你按下CTRL+C键出现">>>"提示符就好了。
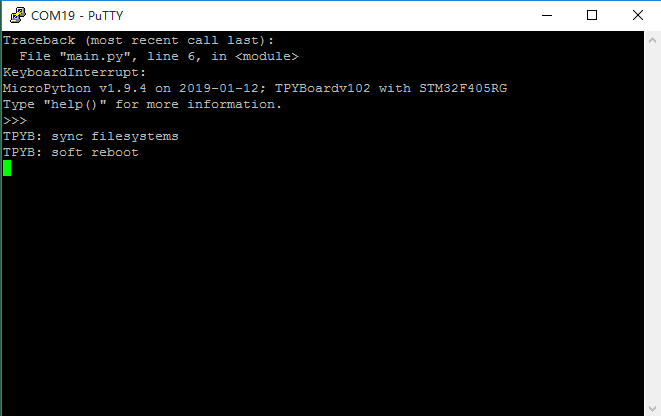
有时可能会多输出一些信息,如下图:
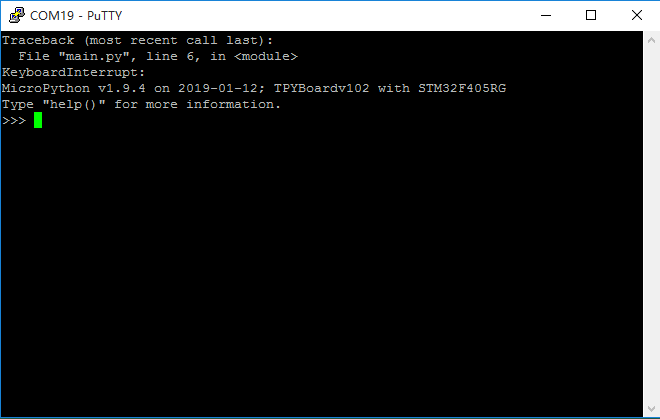
这是因为开发板此时正在运行程序,我们通过外部快捷键CTRL+C强行停止运行,所以出现了上图错误的信息,大家可以忽略这个错误,它并不妨碍我们的正常使用。 同时我们也可以使用快捷键CTRL+D的方式让程序重新运行(软复位)。
那么问题来了,我们在PuTTY软件中看到的这些信息都是什么呢?
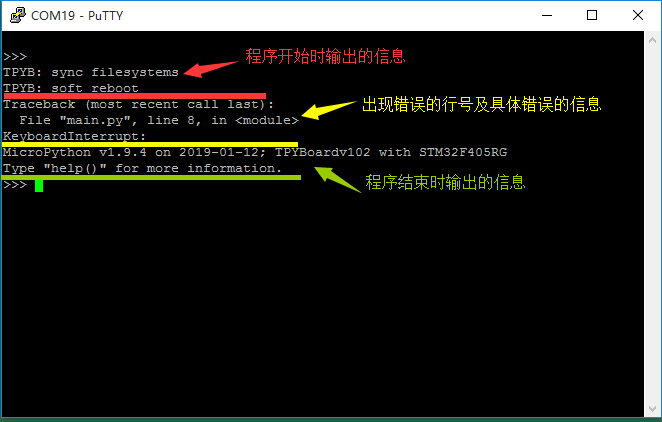
我们在程序中调用print()函数,打印的信息也会出现在PuTTY上。
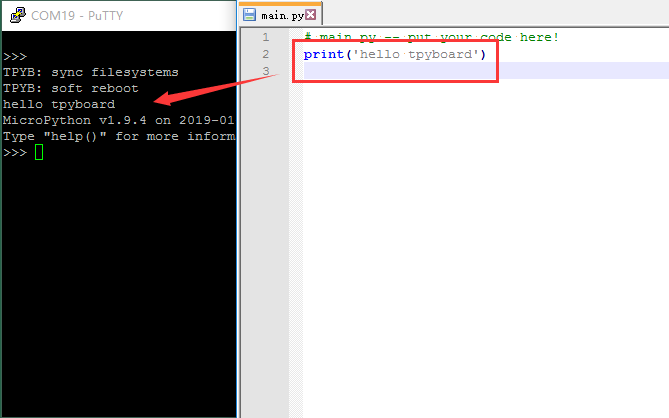
REPL交互模式下,我们不仅可以看到输出的信息,也可以输入一些简单的程序进行交互。例如:
>>> print("hello tpyboard!")
hello tpyboard!
在上面的例子中用户不需要敲入">>>"字符,而是应该在">>>"字符后写入内容。输入print("hello tpyboard!")文本并按下回车键,输出结果将在屏幕上,如上。 如果你已经知道一些Python知识,你也可以尝试一些基本的命令在这里。
>>> pyb.LED(1).on()
>>> pyb.LED(2).on()
>>> 1 + 2
3
>>> 1 / 2
0.5
>>> 20 * 'py'
'pypypypypypypypypypypypypypypypypypypypy'
PuTTY常用快捷键
- Ctrl+C:停止运行程序
- Ctrl+D:重新运行程序(软复位)
注意:
- 1.在使用Ctrl+D快捷键时,需要保证程序是停止运行的状态才会有效。
- 2.有时必须按下RST键进行硬件复位时,需先关闭PuTTY再进行操作,否则下次连接会出错。如果出错了,就再硬复位一次重新打开PuTTY就好了。
常见的程序格式错误
如果出现“SyntaxError: invalid syntax“错误:可能就是tab和空格没对齐的问题。
如果出现“IndentationError: unindent does not match any outer indentation level”错误:可能就是使用的缩进方式不一致。
2.2.2. Linux(Ubuntu)¶
执行查看端口命令
ls -a /dev/ttyA*
使用picocom,若没有安装的,请执行下面命令进行安装。
apt-get install picocom
执行命令打开picocom,连接端口。例如端口号为ttyACM1。
picocom /dev/ttyACM1
提示输入配置参数,基本配置如下:
- 波特率:9600
- 校验位:none
- 数据位:8
- 停止位:1
退出关闭-组合键Ctrl+A+Q。